
FC-EODR: Immersive Humanoid Dual-Arm Dexterous Explosive Ordnance Disposal Robot

 , and
, and
Abstract
:1. Introduction
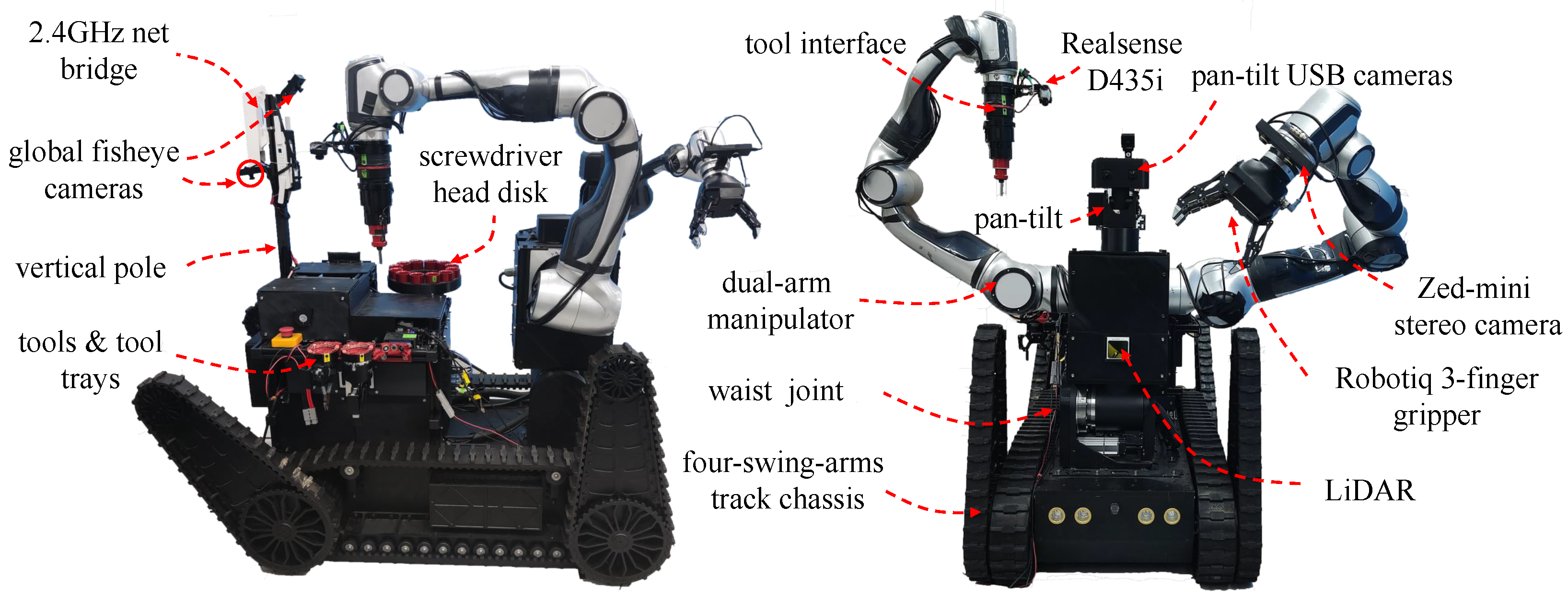
- An immersive teleoperated humanoid dual-arm dexterous EOD robot named the FC-EODR is designed, in which mobile platform, high-position accuracy and force-controlled manipulator, and autoreplacement tool can effectively improve the passability of EOD process, high-precision and dexterous operation ability, stable transfer ability and multitool operation ability.
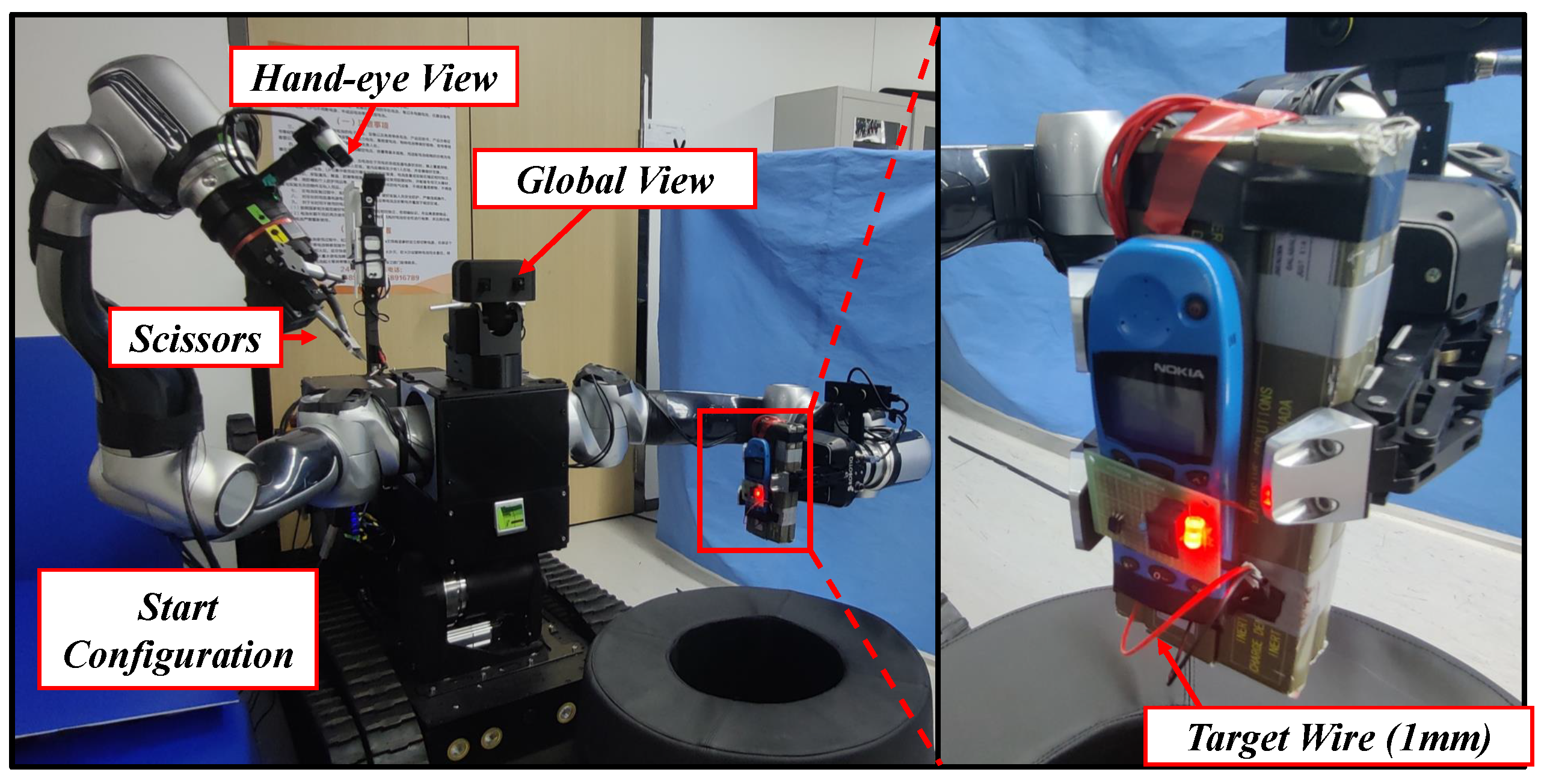
- A new immersive teleoperation system is constructed, and a semiautomatic compliant teleoperation method based on point cloud interaction is proposed, which can further improve the success rate of complex EOD operations. It is verified in cutting wires, screwing, and cutting cardboard tasks.
2. Robot Mechanical System Design
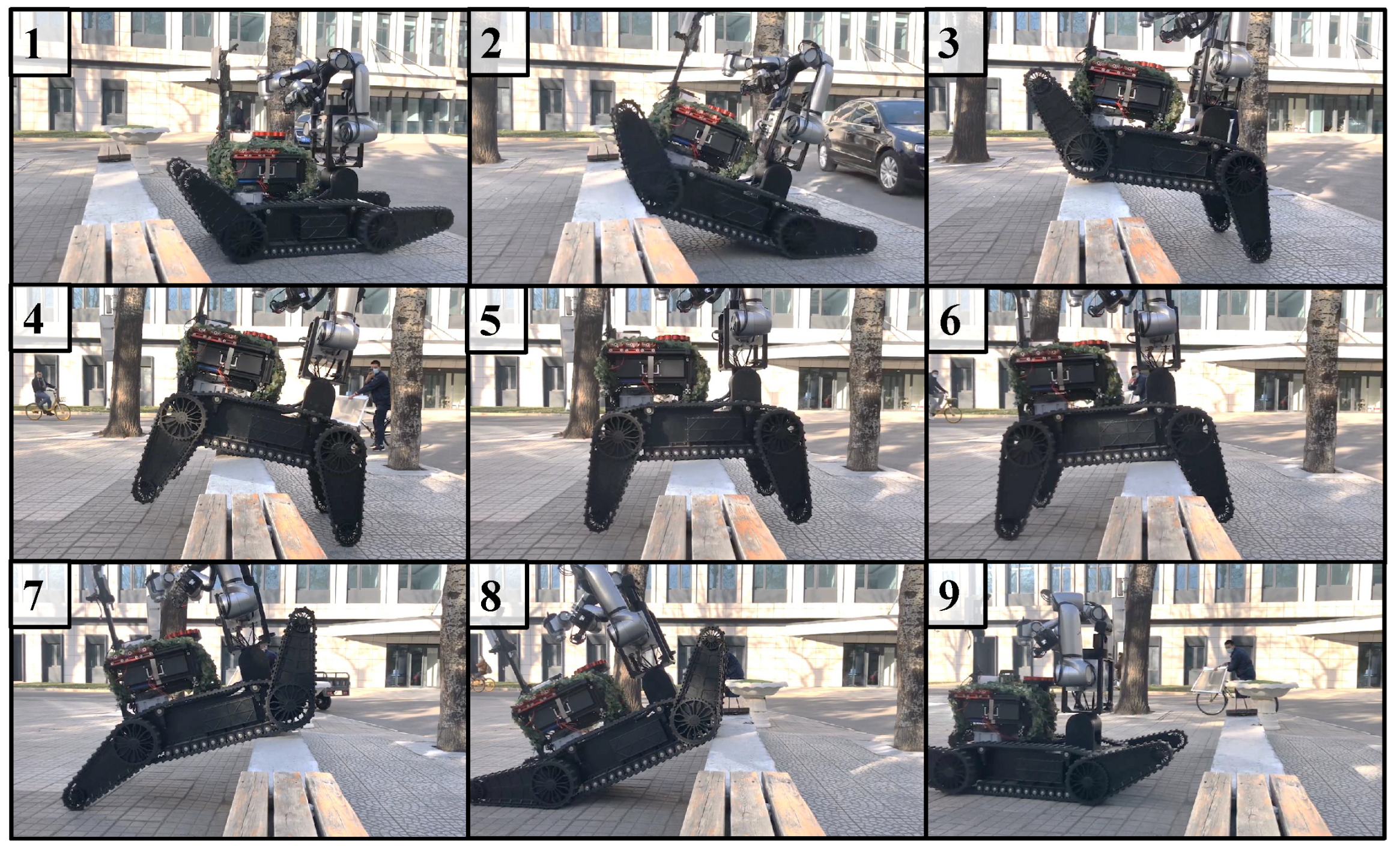
2.1. High-Passability Mobile Platform Design
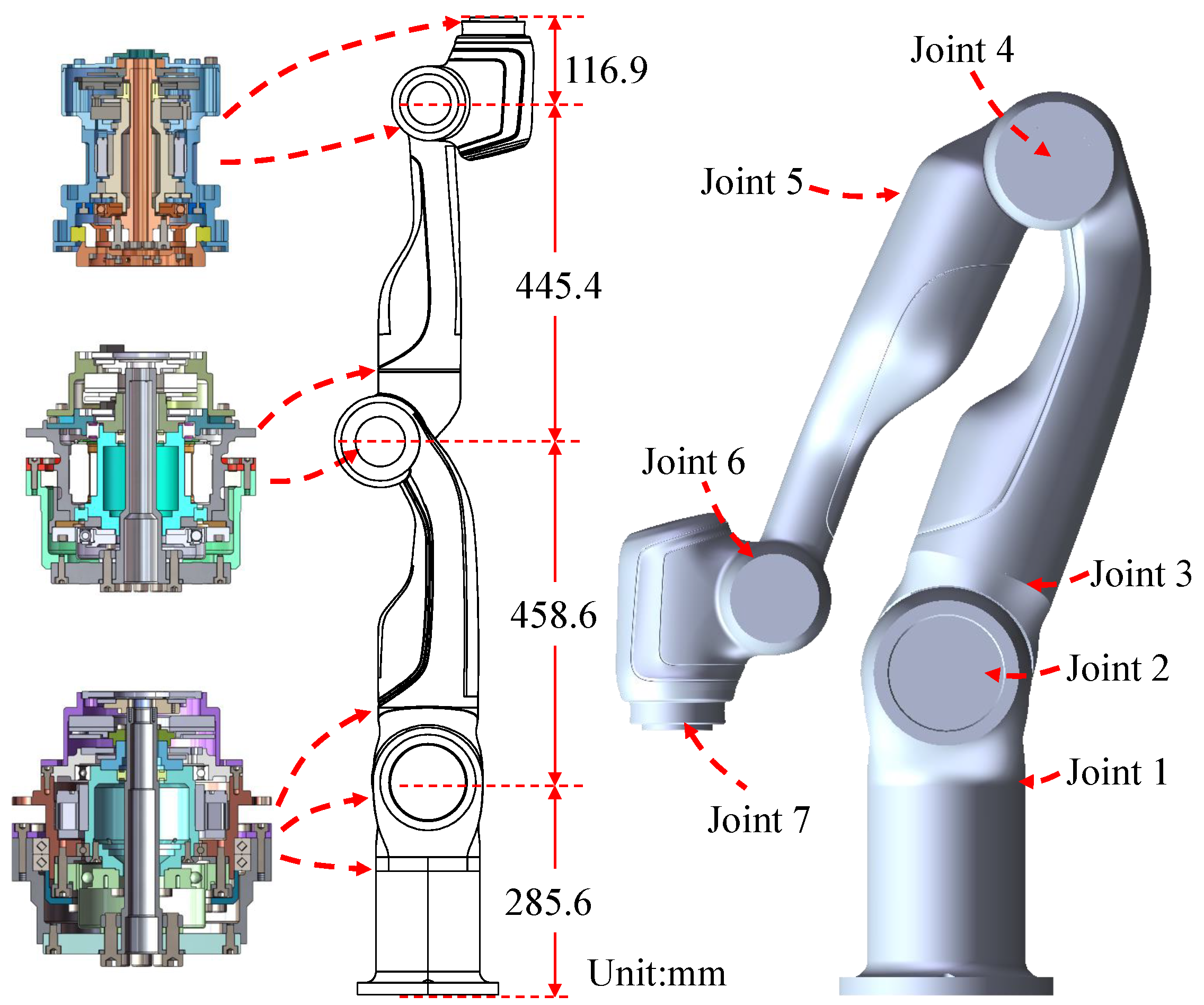
2.2. High-Performance Force-Controlled Collaborative Manipulator Design
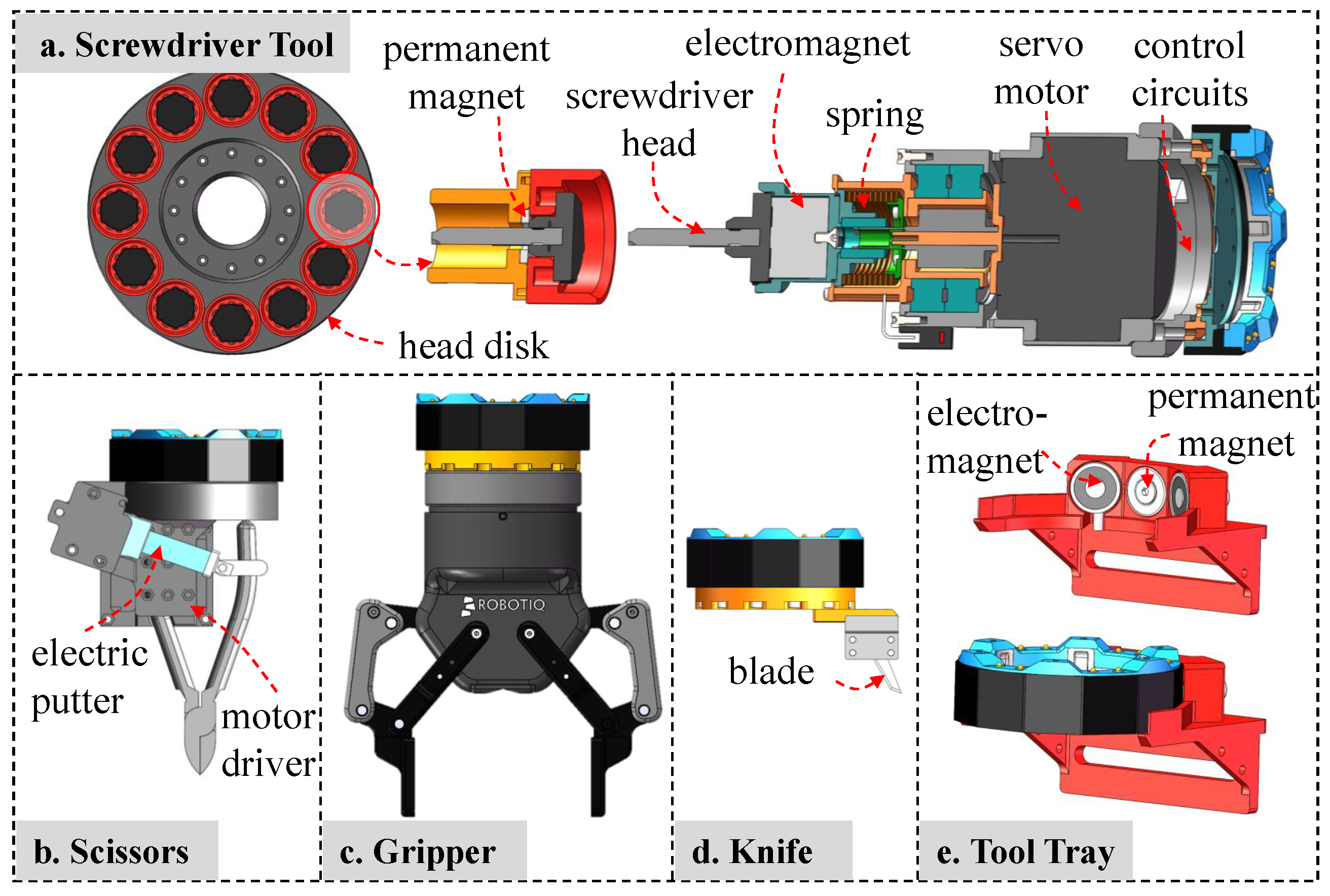
2.3. Automatic Tool Replacement Interface Design
2.4. Perception System Design
3. Robot Control System
3.1. Teleoperation Based on Point Cloud Perception
3.2. Force Controllers for Stable Transfer and Tool Operation
3.3. Automatic Tool Replacement Software
3.4. Autonomous Operation Algorithm Based on Visual Perception
4. Experimental Verification
4.1. Mobile Platform Passability Test
4.2. Teleoperation and Autonomous Operation Experiment
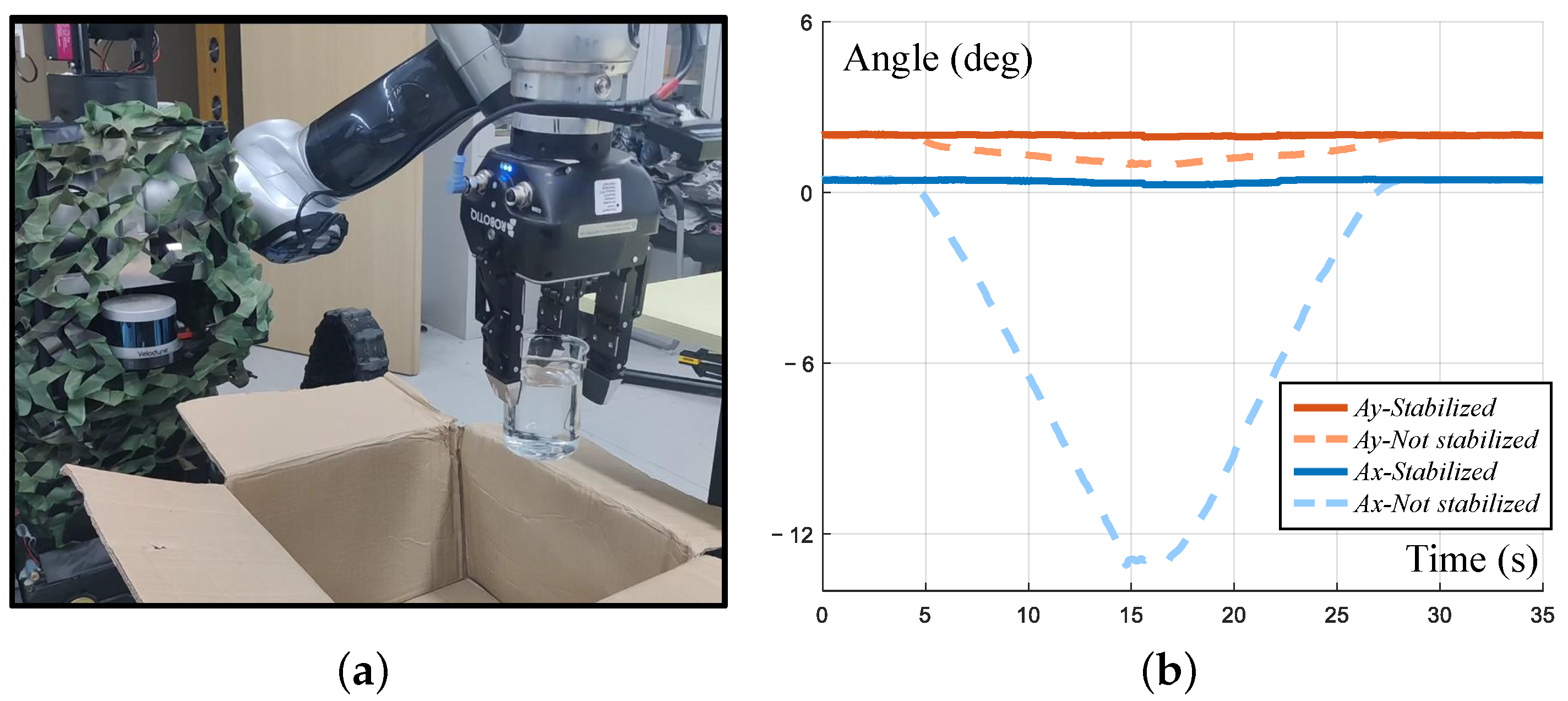
4.3. Stable Transfer Capability Test of Suspicious Explosives
4.4. Simulated EOD Scenario Experiment
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kostavelis, I.; Gasteratos, A. Robots in crisis management: A survey. In Proceedings of the International Conference on Information Systems for Crisis Response and Management in Mediterranean Countries, Xanthi, Greece, 18–20 October 2017; Springer: Berlin/Heidelberg, Germany, 2017; pp. 43–56. [Google Scholar]
- PackBot. Available online: https://www.flir.com/products/packbot/ (accessed on 1 January 2023).
- TELEROB. Available online: https://www.nides.cz/en/telerob/ (accessed on 1 January 2023).
- JP-REOD400. Available online: http://www.ean360.com/com/jptz/sell/itemid-94038.html (accessed on 1 January 2023).
- Smith, C.; Karayiannidis, Y.; Nalpantidis, L.; Gratal, X.; Qi, P.; Dimarogonas, D.V.; Kragic, D. Dual arm manipulation—A survey. Robot. Auton. Syst. 2012, 60, 1340–1353. [Google Scholar] [CrossRef]
- Sun, Z.; Yang, H.; Ma, Y.; Wang, X.; Mo, Y.; Li, H.; Jiang, Z. BIT-DMR: A Humanoid Dual-Arm Mobile Robot for Complex Rescue Operations. IEEE Robot. Autom. Lett. 2021, 7, 802–809. [Google Scholar] [CrossRef]
- Kaneko, K.; Kaminaga, H.; Sakaguchi, T.; Kajita, S.; Morisawa, M.; Kumagai, I.; Kanehiro, F. Humanoid robot HRP-5P: An electrically actuated humanoid robot with high-power and wide-range joints. IEEE Robot. Autom. Lett. 2019, 4, 1431–1438. [Google Scholar] [CrossRef]
- Highly Dexterous Manipulation System. Available online: https://www.wevolver.com/specs/highly.dexterous.manipulation.system (accessed on 1 January 2023).
- Schmaus, P.; Leidner, D.; Krüger, T.; Schiele, A.; Pleintinger, B.; Bayer, R.; Lii, N.Y. Preliminary insights from the meteron supvis justin space-robotics experiment. IEEE Robot. Autom. Lett. 2018, 3, 3836–3843. [Google Scholar] [CrossRef]
- Albu-Schäffer, A.; Haddadin, S.; Ott, C.; Stemmer, A.; Wimböck, T.; Hirzinger, G. The DLR lightweight robot: Design and control concepts for robots in human environments. Ind. Robot. Int. J. 2007, 34, 376–385. [Google Scholar] [CrossRef]
- Sun, Z.; Yang, H.; Dong, Q.; Mo, Y.; Li, H.; Jiang, Z. Autonomous Assembly Method of 3-Arm Robot to Fix the Multipin and Hole Load Plate on a Space Station. Space Sci. Technol. 2021, 2021, 11. [Google Scholar] [CrossRef]
- Carey, M.W.; Kurz, E.M.; Matte, J.D.; Perrault, T.D.; Padir, T. Novel EOD robot design with dexterous gripper and intuitive teleoperation. In Proceedings of the World Automation Congress, Puerto Vallarta, Mexico, 24–28 June 2012; pp. 1–6. [Google Scholar]
- Murphy, R.R. Human-robot interaction in rescue robotics. IEEE Trans. Syst. Man, Cybern. Part C (Appl. Rev.) 2004, 34, 138–153. [Google Scholar] [CrossRef]
- Massey, K.; Sapp, J.; Tsui, E. Improved situational awareness and mission performance for explosive ordnance disposal robots. In Proceedings of the Unmanned Systems Technology XI, Orlando, FL, USA, 14–17 April 2009; Volume 7332, pp. 167–173. [Google Scholar]
- Johnson, J.; Alberts, J.; Berkemeier, M.; Edwads, J. Manipulator Autonomy for Eod Robots; Technical Report; Autonomous Solutions Inc.: Petersboro, UT, USA, 2008. [Google Scholar]
- Deng, W.; Zhang, H.; Li, Y.; Gao, F. Research on target recognition and path planning for EOD robot. Int. J. Comput. Appl. Technol. 2018, 57, 325–333. [Google Scholar]
- Zhang, W.; Yuan, J.; Li, J.; Tang, Z. The optimization scheme for EOD robot based on supervising control architecture. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Guilin, China, 19–23 December 2009; pp. 1421–1426. [Google Scholar]
- Huang, X.; Wu, W.; Qiao, H. Connecting Model-Based and Model-Free Control with Emotion Modulation in Learning Systems. IEEE Trans. Syst. Man, Cybern. Syst. 2019, 51, 4624–4638. [Google Scholar] [CrossRef]
- Jiang, J.; Luo, X.; Xu, S.; Luo, Q.; Li, M. Hand-Eye Calibration of EOD Robot by Solving the AXB= YCZD Problem. IEEE Access 2021, 10, 3415–3429. [Google Scholar] [CrossRef]
- Huang, X.; Wu, W.; Qiao, H. Computational modeling of emotion-motivated decisions for continuous control of mobile robots. IEEE Trans. Cogn. Dev. Syst. 2020, 13, 31–44. [Google Scholar] [CrossRef]
- Del Signore, M.J.; Czop, A.; Hacker, K. Cooperative robotics: Bringing autonomy to explosive ordnance disposal robots. In Proceedings of the Unmanned Systems Technology X, Orlando, FL, USA, 17–20 March 2008; Volume 6962, pp. 517–525. [Google Scholar]
- ROBOTIQ. Available online: https://robotiq.com/products/3-finger-adaptive-robot-gripper (accessed on 1 January 2023).
- Grigore, L.Ș.; Oncioiu, I.; Priescu, I.; Joița, D. Development and Evaluation of the Traction Characteristics of a Crawler EOD Robot. Appl. Sci. 2021, 11, 3757. [Google Scholar] [CrossRef]
- ROBOTIQ. Available online: https://robotiq.com/products/2f85-140-adaptive-robot-gripper (accessed on 1 January 2023).
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Differential Kinematics and Statics. In Robotics: Modelling, Planning and Control; Springer: London, UK, 2009; pp. 105–160. [Google Scholar] [CrossRef]
- Sucan, I.A.; Chitta, S. MoveIt. Available online: https://moveit.ros.org (accessed on 1 January 2023).
- Zhou, Q.Y.; Park, J.; Koltun, V. Open3D: A Modern Library for 3D Data Processing. arXiv 2018, arXiv:1801.09847. [Google Scholar]
- Albu-Schäffer, A.; Ott, C.; Hirzinger, G. A unified passivity-based control framework for position, torque and impedance control of flexible joint robots. Int. J. Robot. Res. 2007, 26, 23–39. [Google Scholar] [CrossRef]
- Sanz, P. Robotics: Modeling, planning, and control (siciliano, b. et al; 2009) [on the shelf]. IEEE Robot. Autom. Mag. 2009, 16, 101. [Google Scholar] [CrossRef]
- Jiang, Z.; Wang, X.; Huang, X.; Li, H. Triangulate geometric constraint combined with visual-flow fusion network for accurate 6DoF pose estimation. Image Vis. Comput. 2021, 108, 104127. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Performance Parameters |
|---|---|
| Payload | 10 kg |
| Workspace Radius | 914 mm |
| Degree of Freedom | 7 |
| Weight | 26 kg |
| Repeatability | ±0.03 mm |
| Force Control Relative Accuracy | 0.2 N, 0.1 Nm |
| Joint1 Range | [−179°, 179°] |
| Joint2 Range | [−90°, 90°] |
| Joint3 Range | [−179°, 179°] |
| Joint4 Range | [0°, 179°] |
| Joint5,6,7 Range | [−179°, 179°] |
| Parameter | Mode A | Mode B |
|---|---|---|
| Average success time (s) | 107.9 ± 65.3 | 70.1 ± 34.1 |
| Success rate | 0.46 | 0.71 |
| Average learn time (min) | 8.6 ± 4.1 | 15.9 ± 9.2 |
| User comfort score | 3.3 ± 0.82 | 4.1 ± 0.56 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Z.; Ma, Y.; Cao, X.; Shen, M.; Yin, C.; Liu, H.; Cui, J.; Sun, Z.; Huang, X.; Li, H. FC-EODR: Immersive Humanoid Dual-Arm Dexterous Explosive Ordnance Disposal Robot. Biomimetics 2023, 8, 67. https://doi.org/10.3390/biomimetics8010067
Jiang Z, Ma Y, Cao X, Shen M, Yin C, Liu H, Cui J, Sun Z, Huang X, Li H. FC-EODR: Immersive Humanoid Dual-Arm Dexterous Explosive Ordnance Disposal Robot. Biomimetics. 2023; 8(1):67. https://doi.org/10.3390/biomimetics8010067
Chicago/Turabian StyleJiang, Zhihong, Yifan Ma, Xiaolei Cao, Minghui Shen, Chunlong Yin, Hongyang Liu, Junhan Cui, Zeyuan Sun, Xiao Huang, and Hui Li. 2023. "FC-EODR: Immersive Humanoid Dual-Arm Dexterous Explosive Ordnance Disposal Robot" Biomimetics 8, no. 1: 67. https://doi.org/10.3390/biomimetics8010067